Bio-Inspired Jellyfish Robot for Deep-Sea Nodule Collection

Title: Development of a Bionic Jellyfish Robot for Collecting Polymetallic Nodules
Author / Sponsor: He Li and colleagues, Shandong University of Science and Technology
Date: February 2025
Report Length: 15 pages
BLUF: A motor-driven bionic jellyfish robot achieves a maximum ascending propulsion acceleration of 27 millimeters per second squared and speed of 33.2 millimeters per second, enabling stable and efficient collection of simulated polymetallic nodules up to 80 millimeters in diameter and 500 grams in weight, as validated through structural optimization, fluid dynamics simulations, and prototype experiments.
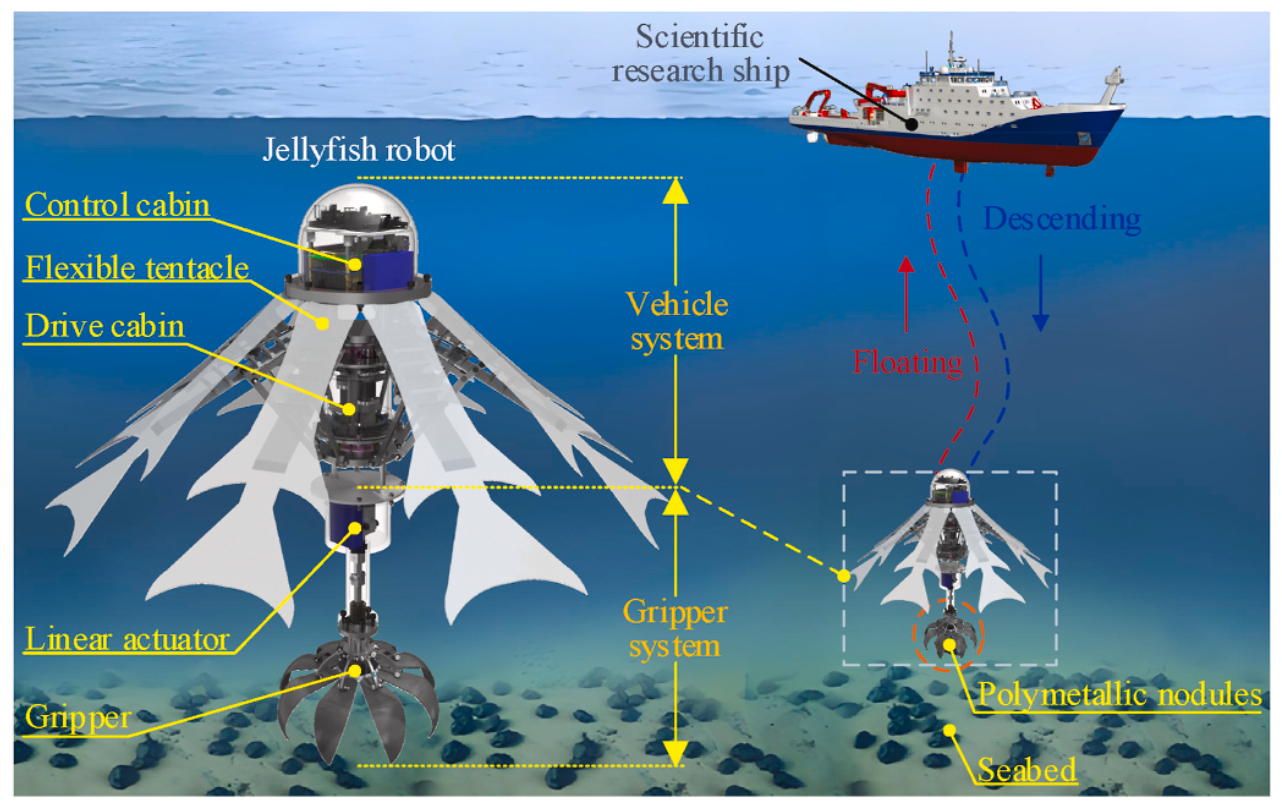
The paper introduces a bionic jellyfish robot designed for seabed polymetallic nodule collection, combining a vehicle system with a full-envelope gripper. As illustrated in Fig. 1, the working principle involves release from a research ship, free descent with closed gripper and contracted tentacles, hovering via tentacle fluctuation, grasping, and rapid ascent.
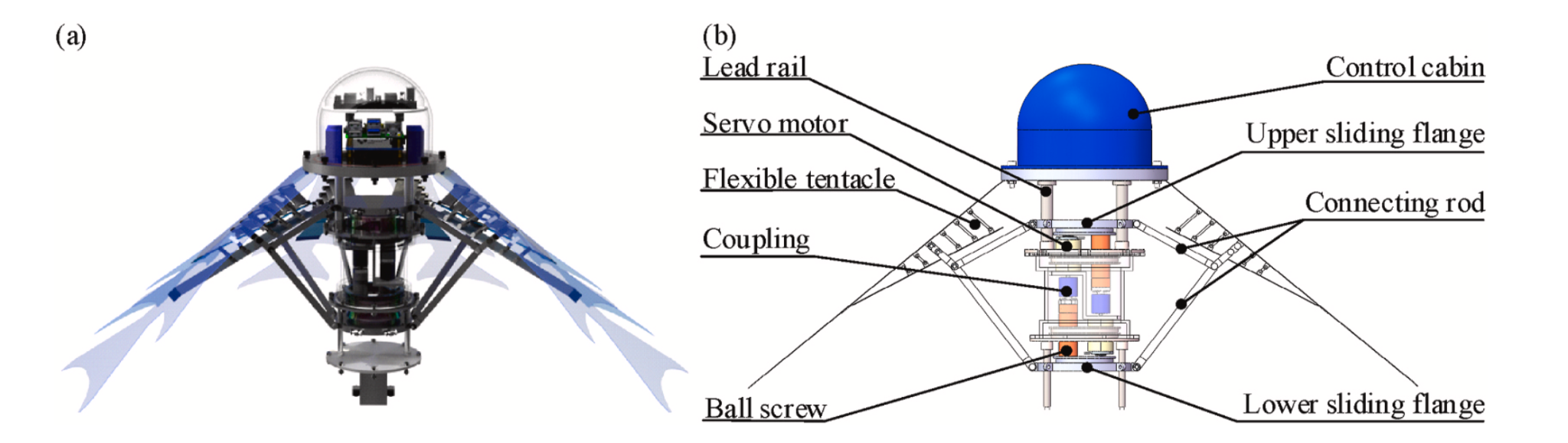
The vehicle system uses two servo linear drive modules to power a linkage mechanism that fluctuates eight flexible tentacles, mimicking jellyfish motion for propulsion. The tentacles, made from 0.5-millimeter-thick unplasticized polyvinyl chloride and incorporating the FinRay effect, feature a double crescent tail fin end to enhance thrust. As shown in Fig. 2, the overall structure includes a hemispherical control cabin housing remote control devices and power supplies, with a drive cabin below containing staggered servo motors connected to ball screws and sliding flanges.
The gripper, positioned below the vehicle system, employs a linear actuator to open and close claws via a linkage, achieving a closed diameter of 100 millimeters and an opened diameter of 140 millimeters, as depicted in Fig. 4.
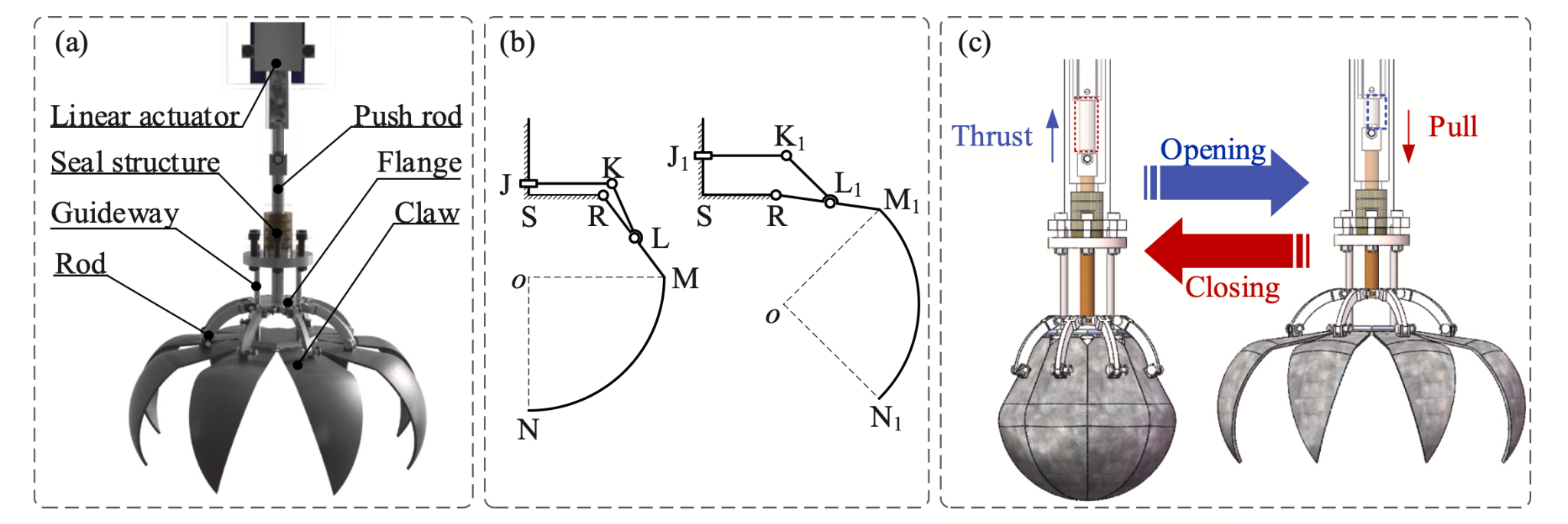
This design adapts to smooth polymetallic nodules, reducing sample shedding risk during ascent. To optimize the transmission mechanism, the authors use multibody dynamics in ADAMS and MATLAB, targeting maximum tentacle swing and minimum power consumption. Six coordinate variables define rod lengths, yielding an optimized swing amplitude of 37.3 degrees at 13.89 watts, a 24.3 percent increase in amplitude and 7.4 percent reduction in power compared to initial values of 30 degrees and 15 watts.
Fluid-structure interaction simulations, employing computational fluid dynamics with overlapping grids in a two-dimensional model, reveal propulsion influences. In self-propelled mode, gripper closure minimizes resistance in both forward and reverse flows, enhancing velocity up to 1 m/s normalized. Higher fluctuation frequencies (1 to 2 hertz) and amplitudes (23 to 37 degrees) boost velocity, displacement, and thrust, with vortex ring formation similar to natural jellyfish jetting driven by pressure gradients.
A Raspberry Pi-based control system enables wireless operation of the vehicle and gripper, with servo drives adjusting motor speeds and hall sensors providing feedback. The 2270-gram prototype, with a relaxed diameter of 662 millimeters, undergoes underwater tests. Descending at 0.5 hertz takes 16 seconds over 580 millimeters, while ascending at 1 hertz reaches 33.2 mm/s velocity and 27 mm/s² acceleration, as depicted in Fig. 20.
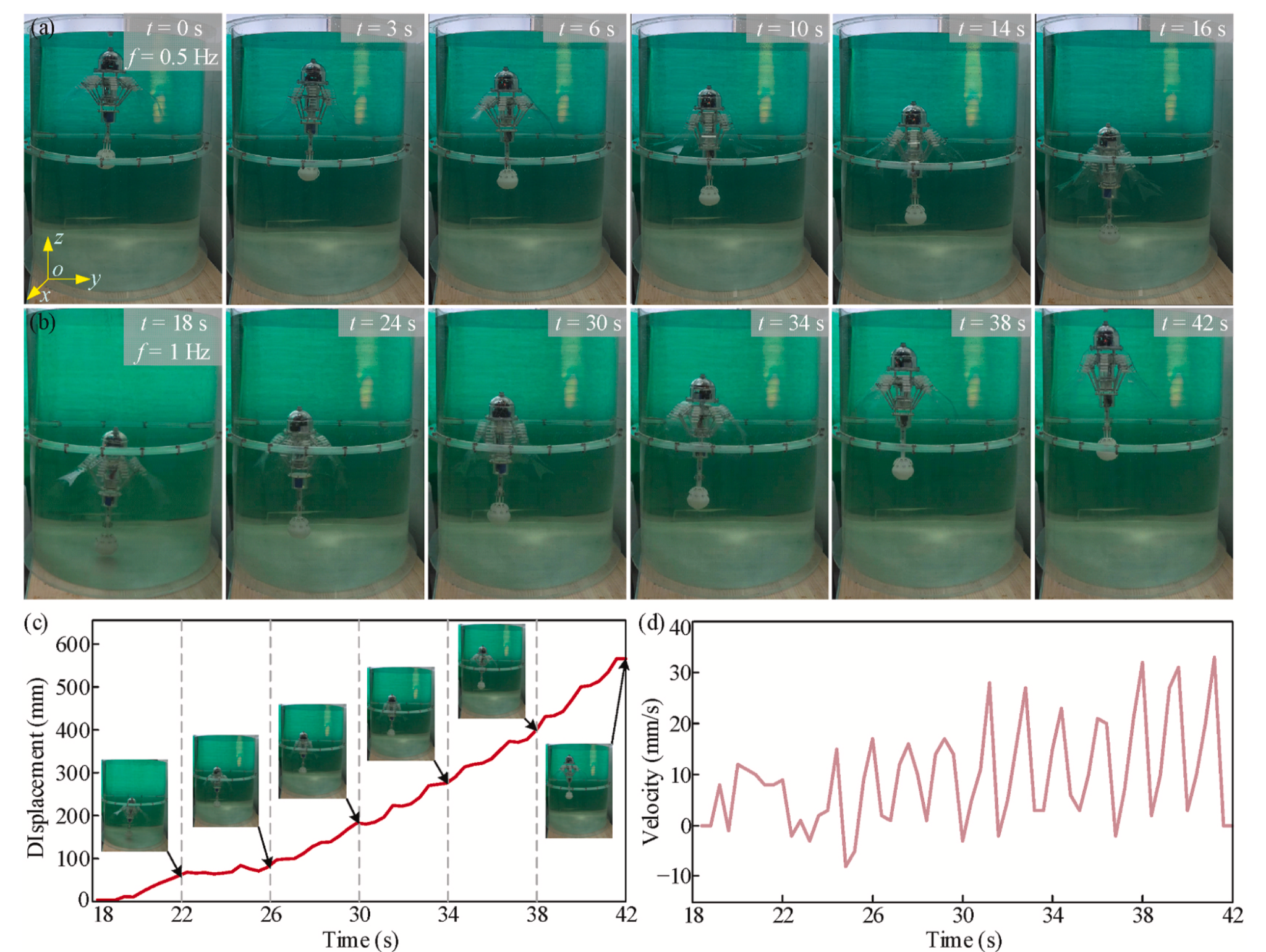
Grasping experiments confirm stable collection of marble-simulated nodules in 10 seconds, with ascent in 26 seconds. Compared to other jellyfish robots, this design offers lower power consumption (16 watts) and wireless control, though slower vertical velocity (33.2 mm/s) due to its size and integrated components like power supplies and sensors. Future improvements include eliminating self-rotation from motor torque and uneven mass distribution, and enhancing gripper capacity.



